Return to Scharff Research Interests page.
Scharff, L.V. (2000). Serial Visual Searches Processed More
Efficiently Across Multiple Depth Planes . Investigative
Ophthalmology and Visual Science, 41, S424. [Abstract]
Visual search research has typically used two-dimensional displays; however, most searches done outside the laboratory are three-dimensional. How do findings using the more constrained two-dimensional displays generalize to three-dimensional searches?
Based on the theory that disparity is processed by multiple channels, several hypotheses seem possible (revised from Melton and Scharff, 1998):
1. If disparity is processed independently in parallel channels, it should be possible to selectively focus attention and perform a serial search at one depth without interference bydistractors placed at other depths. If so:
2. Individual channels may be accessed simultaneously, i.e. in parallel, but attention may not be focused within specific disparities. If so:
3. If disparity is processed in a purely serial manner:
4. If searches are influenced by attention drawn to well-defined surfaces:
Five participants performed three visual search task experiment series (single-depth-plane searches, three-depth-plane searches, and the "cloud" organization searches). For all experiments, participants viewed stimuli through a front-surface mirror stereoscope and responded by pressing designated keys on a keyboard.
More specifically, search times were measured for an L-conjunction search: the targets and distractors were all the same L shape but varied in orientation; the target was always oriented so that the corner was in the top left. The number of distractors in the same depth plane (or range) as the target varied between 5 and 30, with the remainder of the distractors randomly placed in the other two depth planes (or ranges). See Figure 1 for a schematic of the three-depth-plane and cloud stimuli and an example stimulus.
Conditions were repeated so that the target could be in the front, middle (plane of fixation) or back depth position. For both the three-depth-plane searches and the cloud searches, the trials were repeated with one set blocked by depth (target location known to participant) and the other set randomly presented so that the participant did not have prior knowledge of target depth.
Prior to each trial, participants fused a nonius fixation cross.There were 10 trials for each combination of stimulus variables and each participant completed each experiment for both the blocked and random presentation five times, with each entire first set regarded as practice. See example stimuli.
All trials with incorrect responses were excluded from the analyses. For each participant, medians were calculated for each combination of variables for each of the five sessions for each experiment. A completely-within ANOVA was performed for each participant for each experiment.
In the single-plane experiment all participants showed a significant interaction with the search times to the absent trials increasing more rapidly than those for the present trials. Data from the single-plane experiment are shown in both sets of graphs (Figures 2 and 3) as yellow lines
For all the Three-Depth-Plane and Cloud experiments, there were few significant main effects of or interactions with depth plane, and these were not consistent within participants or across participants. Thus, the data shown in Figures 2 and 3 are collapsed across target location.
Figure 2: Three-Depth-Plane Data
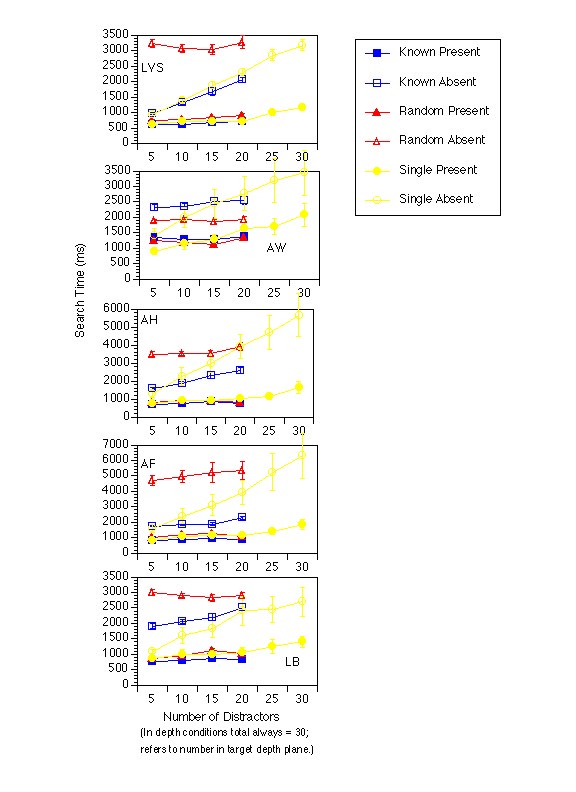
Figure 2 shows each participant's mean search times and standard errors as a function of the number of distractors for the Three-Depth-Plane experiments. The data from the Blocked and Randomized Experiments (blue and red lines, respectively) have been transformed so that the two conditions which had five distractors in the target plane have been averaged, and the same has been done for the two conditions with ten distractors in the target depth plane. Thus, each line for these two experiments only has four points. Note that each of these trials contained a total of 30 distractors (across all depth planes).
Inspection of Figure 2 shows that, for all participants except AW, the target-present search times match those of the single-planeexperiment with the same number of targets. Also, randomly-presented present trials tend to be slightly slower than the blocked trials. Most importantly, in all cases, the responses to the present trials were faster than the responses to the single plane present trials containing 30 distractors. For the absent trials, all but oneparticipant (AW) showed significantly faster responses to the blockedthan to the randomly presented trials. When the target location wasknown (blocked conditions), participants' responses often matched those for the single-plane experiment; in all cases however, they were faster than the single-plane absent trials containing 30 distractors. Finally, when the depth presentation was random, for three of the participants (LVS, AF, LB), search times were not significantly different from the single-plane absent trials containing 30 distractors, while they were significantly faster for the remaining two participants.
For the Cloud Experiments, all participants showed a significant interaction between number of distractors and target presence (faster increases for absent than present trials). Other significant interactions were rare, and none were systematic. Figure 3 shows participants' mean search times and standard errors as a function of the number of distractors for each cloud experiment.
Figure 3: Cloud Experiment Data
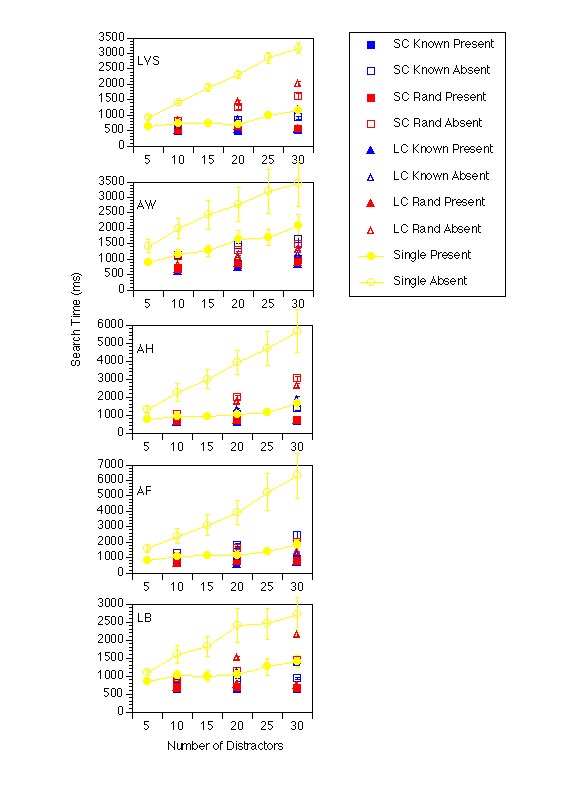
Inspection of Figure 3 shows there is no significant effect for cloud range or knowledge of target location for present trials. In most cases, the cloud presentation trials were processed more quickly than the single plane trials containing the same number of distractors. For all absent trials, searches were much faster than for the comparable single plane absent trials. Most participants were faster when the target location was known, and the effect of cloud range was non-systematic across participants.
Finally, a comparison of the Three-Depth-Plane and Cloud experiment results (across Figures 2 and 3) shows that, relative to the single plane results, the cloud experiment search times were faster than the three-depth-plane results, especially for the absent trials. This cannot be due solely to practice, because not all participants ran the three-depth-plane experiments before the cloud experiments.
When reflecting upon the original hypotheses, a comparison across all experiments favors the conclusion that disparity is processed simultaneously, and in some cases independently, in the different disparity channels.
Independent processing is supported in that most participants benefited from prior knowledge of target location and that distractors in other depth planes did not seem to slow the search. More specifically, in the three-depth-plane experiments the search times when the target location was known tended to reflect the number of distractors in the target's depth plane. Only in absent trials when the target location was not known did some participants seem to revert to a purely serial search across all distractors. Influence of target location was not as apparent with the cloud experiments; however, that knowledge was not as precise: participants were told only that the target would be in front of, at, or behind the plane of fixation.
Whereas most participants did show faster search times for th econditions in which the target location was known, AW showed much faster search times for the randomly-presented target locations. Thus, it seems that, in some cases, independent processing is not possible, and efforts to selectively attend to a particular channelor depth range actually hinder the search.
The strongest support for the conclusion that disparity channels are processed simultaneously is the decreased search times for all depth conditions relative to the single plane experiment. This increase in processing efficiency was most apparent for the cloud experiments, when the distractors were spread across many more depth planes.
The conclusions of simultaneous and possibly independent processing are in partial agreement with previous research. Nakayama and Silverman (1986) concluded that depth planes could be independently processed and selectively attended. However, they concluded that across depth planes, searches proceeded in a serial manner. Marrara and Moore (1998) also concluded that depth planes could be selectively attended, but they along with others (He and Nakayama, 1995; Carley and He, 1998), stressed that the crucial factor is that the depth plane or range form the perception of a coherent surface. The current results of the cloud experiment argue strongly against such a conclusion. For all participants, the cloud experiment resulted in the fastest search times. The simplest explanation is that the processing was divided among multiple channels. It is possible that the task differences (a serial search within the relevant depth plane/range versus preattentive tasks within the relevant depth plane / range) led to these differences in conclusions.